Роботы и 3D-печать – мощная комбинация! Рассмотрим самые впечатляющие и передовые проекты 3D-печатных роботов, многие из которых можно сделать самостоятельно в домашних условиях.
25 лучших 3D-печатных моделей и проектов
Humanoids (Гуманоидные роботы)
Сочетая робототехнику и трехмерную печать, люди ежедневно расширяют границы своих возможностей и гуманоидные роботы являются прекрасным тому примером.
Роботы-гуманоиды создаются для того, чтобы тем или иным образом представлять или имитировать внешний вид и действия человека. Каждый день специалисты работают над созданием новых роботизированных систем, стремясь сделать их максимально приближенными к реальности. Гуманоидные роботы могут ходить, говорить, жестикулировать, а также многое другое. Они подходят для многих областей применения, включая медицину и уход за больными.
Рассмотрим несколько интересных моделей гуманоидных роботов, популярных среди любителей и профессионалов в сфере робототехники.
1. Kengoro (Кенгоро).
Этот человекоподобный робот, созданный исследователями из Токийского университета, может отжиматься больше, чем кто бы то ни было. При его разработке ученые уделяли основное внимание мышечным способностям.
Сила – большая проблема для роботов с шарнирными соединениями. По мере увеличения числа степеней свободы и точности движений у них снижается мышечная сила.
Он может сделать больше отжиманий, чем вы (Источник: JSK Lab/Tokyo University и IEEE Spectrum)
Но у робота Kengoro нет такой проблемы. Он может отжиматься, заниматься спортом, бегать и даже играть в бадминтон. Для выполнения всего перечисленного роботу не требуется никакого дистанционного управления, так как все его движения являются независимыми. Например, при игре в бадминтон этот гуманоид выполняет все необходимые движения, определяет направление волана и двигается в нужную сторону по собственному желанию.
Один из секретов способностей Кенгоро – встроенное охлаждение, имитирующее способность человека регулировать температуру своего тела. При определенных физических нагрузках робот искусственно потеет для охлаждения механизма, что позволяет ему работать более эффективно и на протяжении более длительного времени.
Какую роль сыграла 3D-печать при создании этого гуманоидного робота? Механические детали и рама Kengoro были изготовлены с применением метода селективного лазерного спекания (SLS).
2. InMoov
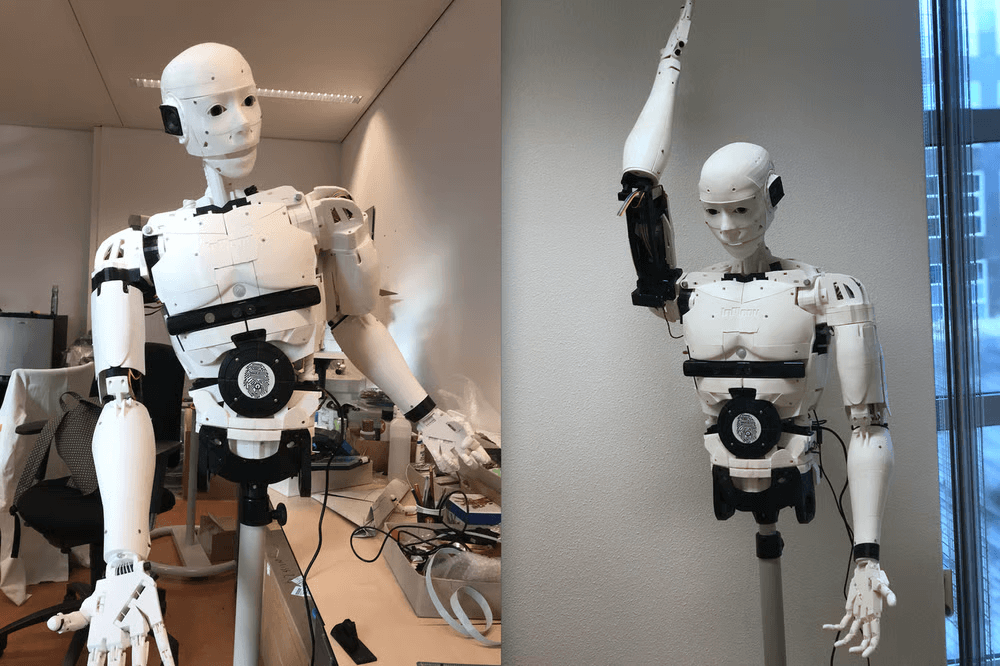
InMoov – один из старейших проектов в области 3D-печатной робототехники. Созданный французским скульптором и дизайнером Гаэлем Ланжевеном в 2012 году, этот робот изначально выполнял функции протеза руки. Его конструкция постепенно подвергалась изменениям и усовершенствованиям, и теперь это 3D-печатный робот в натуральную величину. Данная модель – поистине впечатляющее достижение не только за счет своих размеров, но и благодаря плавной, изящной жестикуляции вплоть до кончиков пальцев. Кроме того, это проект с открытым исходным кодом, задуманный как развивающая платформа для студентов, разработчиков и ученых. По факту, InMoov стал первым 3D-печатным протезом руки с открытым исходным кодом.
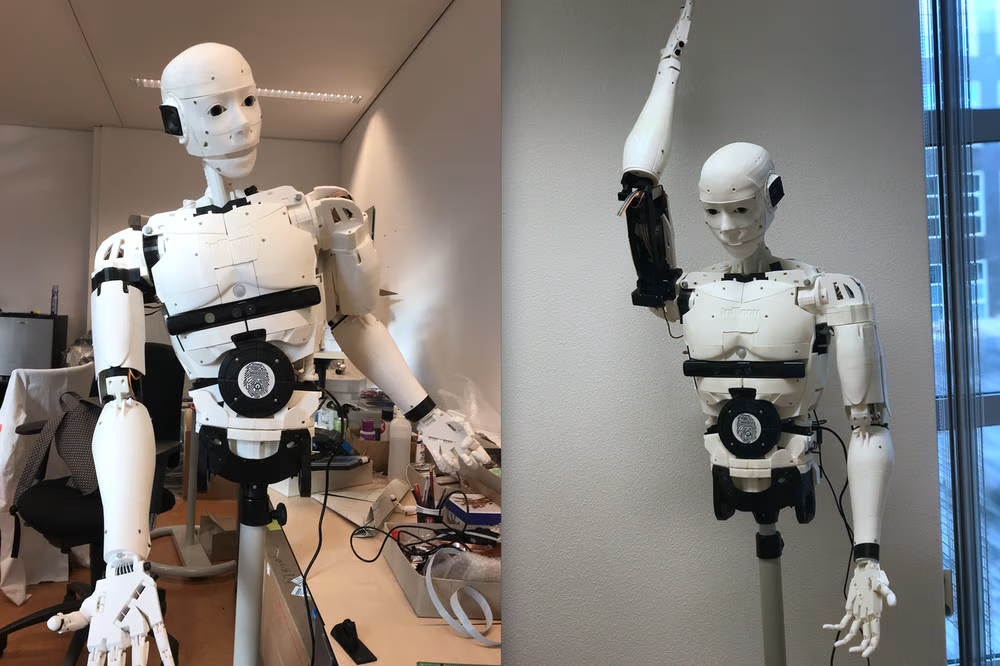
Верхняя часть туловища гуманоида InMoov (Источник: Emerging Tech Blog)
Робота InMoov можно сделать самостоятельно. Для этого понадобятся:
- настольный 3D-принтер, объем печати которого составляет не менее 12х12х12 см
- платы микроконтроллеров Arduino Uno и Mega;
- три серводвигателя – HK15298B, HiTec HS805BB, MG996;
- программное обеспечение - MyRobot Lab, Python.
InMoov продолжает оставаться фаворитом среди разработчиков по всему миру. С каждым годом он приобретает все больше возможностей. К примеру, недавно его конструкция была усовершенствована путем добавления системы технического зрения, улучшенной механики и ног.
Интересный факт: существует карта мира, с помощью которой можно связаться с создателями InMoov со всего земного шара.
3. Reachy (Ричи).
В 2019 году французская компания Pollen Robotics представила своего высокоинтерактивного робота Reachy, оснащенного искусственным интеллектом. Ричи – 3D-печатный роботизированный торс, способный играть в крестики-нолики или, например, подавать кофе. Основная цель его разработки – использование в сфере обслуживания клиентов.

Ричи раздает брошюры (Источник: Pollen Robotics)
Робот выглядит довольно мило: у него анимированные усики и голова с двумя «глазами», которая может двигаться, передавая эмоции. Руки Ричи имеют широкий диапазон движения, по размеру схожи с руками взрослого человека и способны поднимать предметы весом до 500 граммов. Для управления роботом можно использовать VR.
Каждая деталь Reachy напечатана на 3Д-принтере. Кроме того, компания Pollen Robotics сделала его дизайн открытым, чтобы каждый желающий мог внести свой вклад в разработку этого робота.
Ричи можно приобрести в нескольких различных конфигурациях, начиная с базовой модели с одной рукой и без головы и заканчивая усовершенствованной модификацией с головой и двумя руками. Можно даже выбрать дизайн рубашки робота!
4. ED-A.
Этот робот выглядит так, как будто вышел прямо из фантастического фильма, но на самом деле он настоящий. Имя этого впечатляющего гуманоида – ED-A, или просто Эдди. Он был разработан инженером по имени Грег из компании Gwas Tech и является полностью 3D-печатным роботом, использующим искусственный интеллект и машинное обучение. В режиме разработки роботом Эдди можно управлять как голосом, так и с помощью пульта дистанционного управления.

Он может дрессировать вашу собаку (Источник: gwas_tech через Instagram)
ED-A может говорить, ходить и поворачиваться в соответствии с инструкциями, а также замечать присутствие человека и обращаться к нему. Он умеет формировать мнения о том, что ему нравится или не нравится. Кроме того, Эдди дружелюбно относится к животным: может разговаривать с собаками, раздавать им лакомства и даже дрессировать их!
Разработчик Эдди делится своими достижениями через социальные сети YouTube и Instagram, поэтому все желающие могут наблюдать, как робот развивается по мере добавления новых функций. В видеороликах разработчика можно увидеть некоторые весьма продвинутые возможности. К примеру, как робот использует свой собственный голос для общения с пользователями. А в одном из видеороликов автор показывает роботу разные предметы, в частности, клавиатуру и электрическую отвертку, и ED-A распознает их, произносит названия и высказывает собственное мнение об этих предметах.
5. Джимми
У Джимми дружелюбный дизайн. Это человекоподобный робот 21-го века с техническим названием Interbotix HR-OS1, работающий на базе чипа Edison от компании Intel. Модель была создана в 2014 году и имеет открытый исходный код, которым можно управлять дистанционно через Wi-Fi. Разработка робота Джимми продолжается и по сей день.
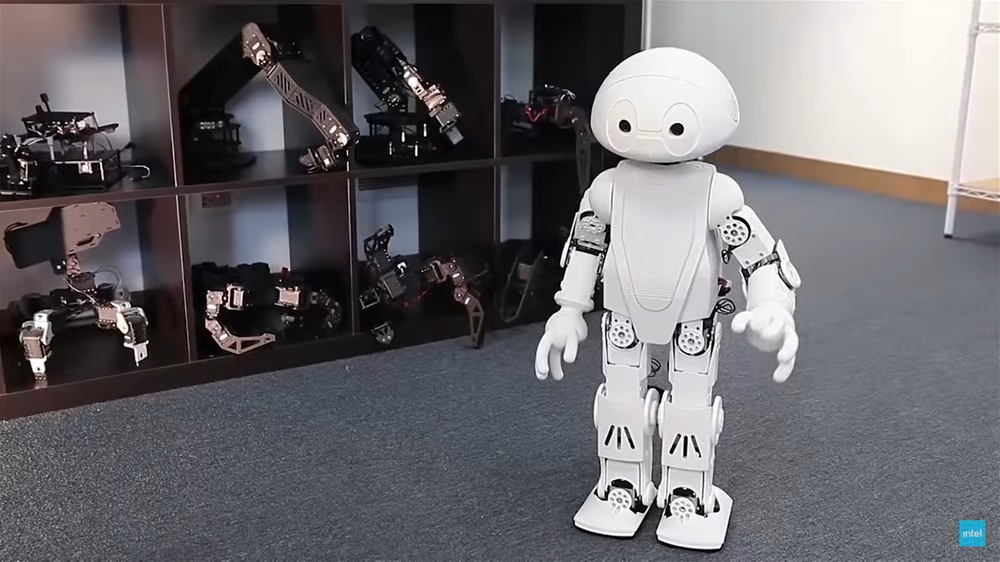
У робота Джимми дружелюбный дизайн (Источник: Intel на YouTube)
В основе этого робота лежит эндоскелет, а внешняя оболочка, которая и придает Джимми дружелюбный вид, может быть напечатана и настроена по вкусу пользователя. Настроить можно не только оболочку, но и функциональные возможности машины. Кстати, это даже желательно и весьма поощряется, так как разработчики активно пропагандируют такой аспект, как персонализация.
Джимми имеет множество доступных оболочек. С момента разработки этот робот регулярно используется во многих образовательных кампаниях, а также в сфере социальной работы с детьми с особыми потребностями. Одна из его оболочек под названием Callim была разработана 11-летним мальчиком, а команда 21st Century Robot превратила ее в настоящий 3D-печатный экзоскелет.
6. Aspir V2
Aspir V2 – 3D-печатный гуманоидный робот с открытым исходным кодом, которому есть, о чем поговорить. В 2018 году был выпущен первый Aspir - «автономный робот для поддержки и позитивного вдохновения», созданный Джоном Чоем на основе «робота-посла Галлея» (2015 г.). Через год после Aspir вышла вторая версия под названием Aspir V2. При своих «детских» размерах - росте 4 фута (чуть более 1,2 м) и весе всего 30 фунтов (около 13,5 кг) - этот робот функционирует с помощью 22 моторов. Он оснащен гуманоидной автоматикой и отличается высокой маневренностью. На каждую ногу приходится шесть сверхбольших сервоприводов, а на каждую руку – четыре высокомоментных стандартных сервопривода. Кроме того, каждая рука оснащена пятью микросервоприводами с металлической шестерней. В довершение, робот имеет два дополнительных стандартных сервопривода для механизмов наклона и поворота головы.
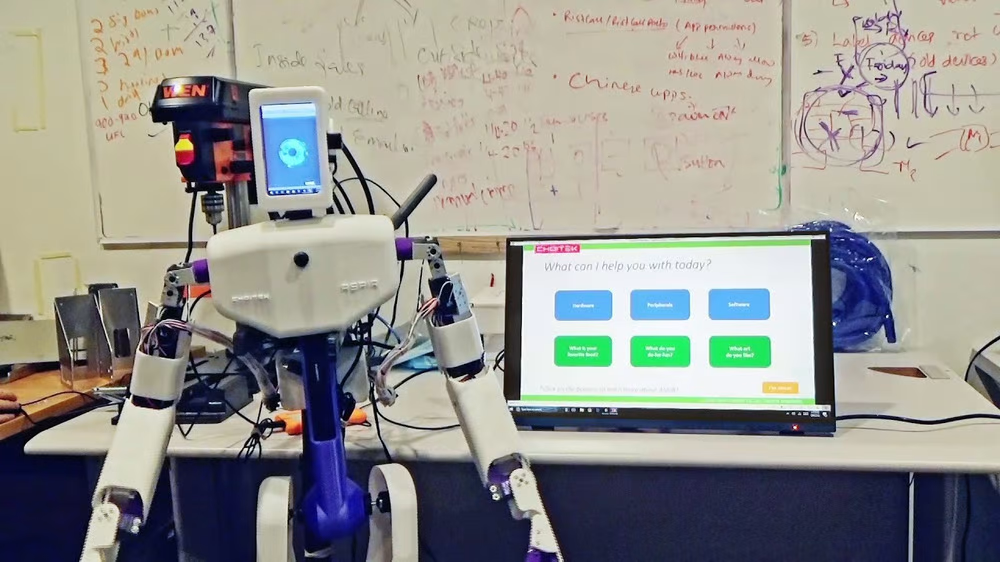
С роботом-гуманоидом ASPIR V2 есть о чем поговорить (Источник: Choitek на YouTube)
Каждая из 90 деталей, образующих корпус Aspir V2, напечатана на 3D-принтере. Общая продолжительность печати всех элементов составляет приблизительно 300 часов. Для самостоятельного изготовления робота понадобятся: 3D-принтер с объемом сборки не менее 250х250х250 мм, 5 кг пластикового филамента PLA, файлы с GitHub. Полное руководство и список доступных материалов можно найти на сайте Instructables.
7. Atlas
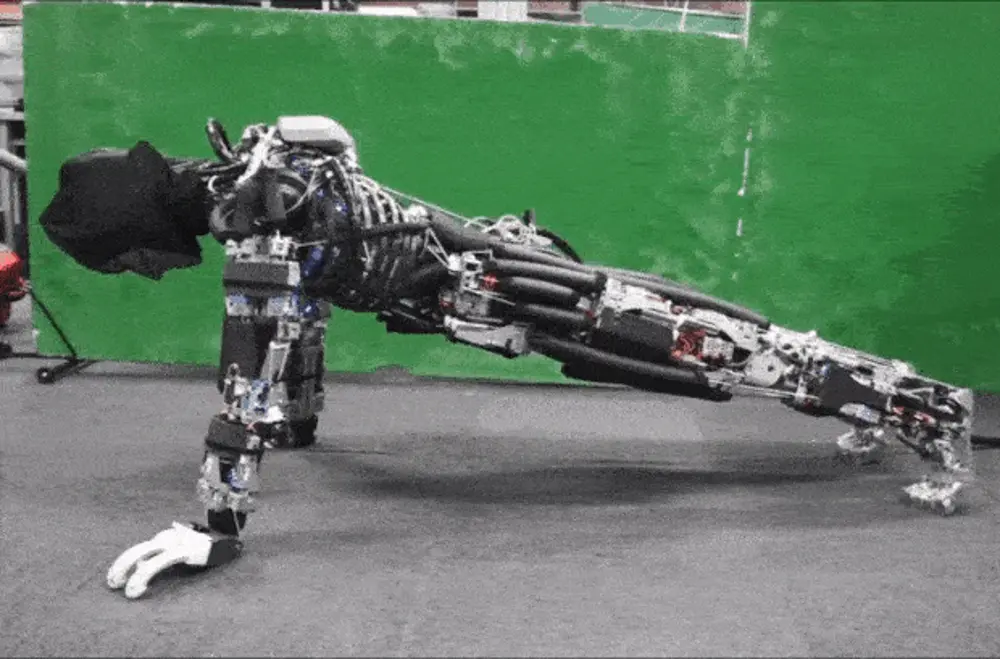
Робот Atlas, разработанный компанией Boston Dynamics, является одним из самых популярных роботов среди пользователей сети Интернет. Однако, лишь немногим известно, что он частично напечатан на 3D-принтере. Модель была создана на основе более раннего человекоподобного робота Peatman от Boston Dynamics и изначально была предназначена для выполнения поисково-спасательных задач.
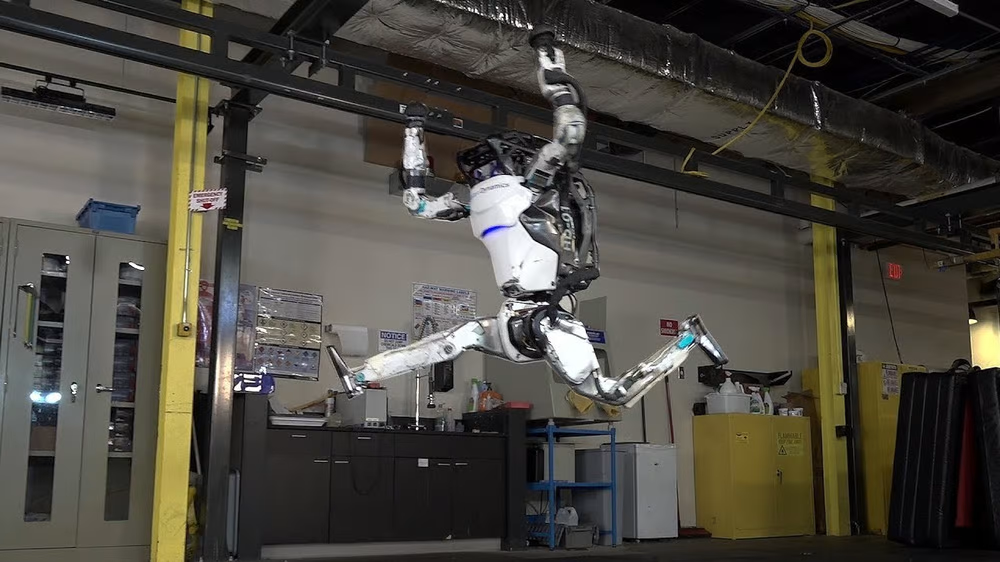
Робот Atlas от Boston Dynamics демонстрирует свои невероятные навыки гимнастики (Источник: Boston Dynamics на YouTube)
По заявлению производителя, Atlas был разработан, чтобы расширить границы «мобильности всего тела». Его руки и ноги изготовлены с помощью 3D-печати по металлу. Благодаря этому они наделены достаточной легкостью и прочностью, чтобы выполнять гимнастические движения, для которых и предназначен этот робот.
Первоначальные версии Атласа, разработанные в 2013 году, были исключительно механическими. Но в последние годы возможности трехмерной печати металлами достигли столь высокого уровня, что появилась возможность производить функциональные детали для таких маневренных роботов.
8. Biomimetic Mechatronic Hand (биомиметическая мехатронная рука)
Эта роботизированная рука невероятно похожа на настоящую! Она была разработана Уиллом Когли и на данный момент является еще не завершенным проектом. Биомиметическая мехатронная рука – университетский проект, целью которого является создание механизма, как можно более точно имитирующего движения, захват и силу человеческой руки. На данный момент первый критерий из трех уже достигнут.
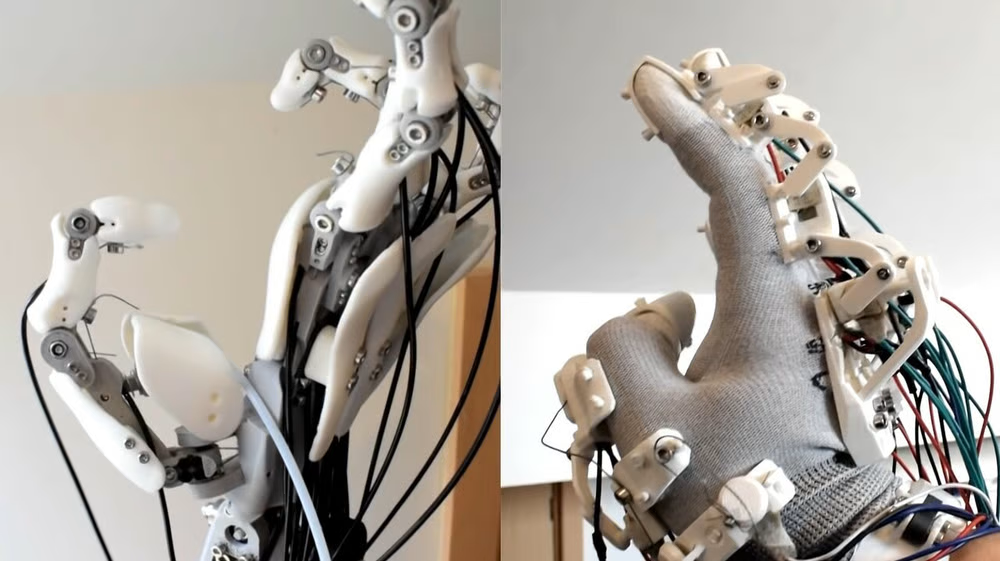
Эта биомиметическая рука очень похожа на настоящую! (Источник: Уилл Когли на YouTube)
Рука человека состоит из множества мышц и сухожилий, поэтому представляет собой большую проблему в области протезирования. Создание мехатронной руки стало очень успешной попыткой воспроизвести реальные системы движения руки. На сегодняшний день данный механизм имеет впечатляющие 23 степени свободы и способен в точности повторять движения настоящей руки. В планах разработчика – улучшить захват, чтобы он мог быть таким же эффективным, как захват настоящей руки. Именно на этом и сосредоточил свое внимание автор: сейчас он занимается изучением возможностей в плане повышения прочности конструкции.
Роботизированные руки
Роботизированные руки – это механические системы, состоящие из осей, которые соединены друг с другом для придания руке различных степеней свободы и обеспечения разных типов движения. Конечности такого механизма способны поворачиваться и вращаться для воспроизведения определенного движения.
Робо-руки работают на базе программного обеспечения, тип и функционал которого зависят от функции, которую должна выполнять механическая рука. При этом, большинство роботизированных рук очень похожи друг на друга и отличаются только используемым методом передачи данных и запрограммированным движением.
Еще не так давно робо-руки использовались преимущественно в промышленности, но благодаря 3D-печати теперь их можно использовать и дома.
Ниже представлены некоторые роботизированные руки.
1. LittleArm V3
LittleArm V3 – полностью 3D-печатный комплект для робототехники на базе Arduino, созданный на основе первого проекта LittleArm, который был разработан в 2016 году. Благодаря захвату, напечатанному на 3D-принтере, эта робо-рука собирается легче, чем предыдущие версии.

Благодаря захвату, напечатанному на 3D-принтере, LittleArm V3 легче построить, чем предыдущие версии (Источник: SlantConcepts через Twitter)
Роботы LittleArm – проект дизайнера Гейба Бентца, направленный на внедрение модели STEM (Science, Technology, Engineering, Mathematics - система, объединяющая инженерные предметы и естественные науки) в учебный процесс. Когда ему это удалось, он понял, что придется изготовить большее количество роботизированных рук, чем предполагалось. Это привело к созданию огромной фермы принтеров, которая в последующем превратилась в компанию Slant 3D. На базе этой компании была создана линейка наборов роботов LittleBots с Arduino, предназначенных для изучения STEM.
LittleArm V3 состоит всего из четырех 3D-печатных деталей и не нуждается в использовании винтов для сочленения захвата. Вместо винтов используется интегрированный шарнир, напечатанный на 3Д-принтере. Общий дизайн устройства выглядит довольно изящно. Рука легко собирается, имеет улучшенный захват и, в отличие от предыдущих версий, снабжена обновленной версией программного обеспечения. V3 идеально подходит для использования в качестве учебного пособия для детей, но может использоваться и взрослыми любителями робототехники.
2. Niryo One
Niryo One – 3D-печатный 6-осевой робот-рука, предназначенный для совместной работы в сфере образования. Модель была разработана в 2016 году и доступна для приобретения как в виде набора, так и в полностью собранном виде. Первоначально проект Niryo, запущенный на платформе Kickstarter, развивался за счет усовершенствования программного обеспечения и дизайна.

Niryo One можно приобрести в виде комплекта или в полностью собранном виде (Источник: Niryo)
Роботизированная рука Niryo One применяется для ознакомления с промышленными роботами. Она очень точна и управляется при помощи шаговых двигателей, которые, в свою очередь, управляются системами Arduino и Raspberry Pi. Устройство легко программируется – процесс выполняется с помощью бесплатного настольного приложения и занимает менее пяти минут.
В интернете можно найти полезные видео о том, как собрать комплект Niryo One.
3. Gesture-Controlled (роботизированный манипулятор, управляемый жестами)
«На шаг ближе к тому, чтобы стать Железным человеком» - девиз этого уникального устройства.
Роботизированный манипулятор, управляемый жестами рук, был разработан Эбеном Коуао. Структурные элементы механизма напечатаны на 3D-принтере. Автор предоставляет полный код и подробные инструкции с открытым исходным кодом, а также список деталей, необходимых для воспроизведения манипулятора.

На шаг ближе к тому, чтобы стать Железным человеком (Источник: Eben Kouao на YouTube)
Модель состоит из двух систем: роботизированной руки и 3D-печатной перчатки, которая используется для управления движениями руки. С помощью движений, например, движений пальца, можно открывать и закрывать зажим руки, а при помощи движений запястья можно двигать всей рукой.
Разработчик призывает пользователей придумывать собственные функции для роботизированного манипулятора и делиться ими на платформе GitHub, чтобы можно было еще больше усовершенствовать устройство.
4. LittleArm Big
Проект LittleArm Big можно охарактеризовать, как «несколько рук собираются вместе».
Это еще одна образовательная модель, изначально предназначенная для использования в качестве учебного инструмента для старшеклассников и студентов колледжей на занятиях по STEM.

Несколько роботизированных рук собираются вместе (Источник: Slant Concepts через Arduino Project Hub)
LittleArm Big – сложная 3D-печатная роботизированная рука с сервоприводом, разработанная компанией Slant Robotics в 2017 году. Устройство может достигать размеров 11,5 дюймов (около 29 см) и переносить объекты весом до 0,25 фунтов (примерно 113 граммов). Рука предназначена для программирования и может управляться через Bluetooth, а также через приложения для Windows. Чтобы управлять этим роботом с устройств на базе iOS, понадобится перейти с кода Python.
Из менее чем 50 компонентов руки LittleArm Big 12 деталей изготовлены методом 3D-печати. Эти детали не являются сервоприводами или электроникой и управляются с помощью Arduino Nano. Разработчики утверждают, что модель можно собрать меньше, чем за два часа, но для сборки и настройки манипулятора с шестью DOF (степенями свободы) может потребоваться соответствующий опыт.
5. Scara и Scara-принтеры
Роботизированные руки-манипуляторы Scara отличаются высокой точностью и простотой копирования.
Термин Scara расшифровывается, как «роботизированная рука с избирательной сборкой». Это разновидность роботизированной руки, которую можно напечатать на 3Д-принтере и использовать для трехмерной печати.

Роботы-манипуляторы SCARA отличаются высокой точностью и простотой воспроизведения (Источник: How To Mechatronics на YouTube)
Тип движения таких манипуляторов позволяет добиться высокой точности, хотя они и более ограничены в степенях свободы, чем другие конструкции. Scara-роботов можно использовать для сборки более традиционных роботизированных рук или специально для трехмерной печати. Благодаря простой геометрии конструкции их очень легко печатать самостоятельно. С помощью такой простой, но умной системы можно напечатать новый 3D-принтер или роботизированную руку.
Зооморфные роботы
Зооморфные роботы – это роботизированные механизмы, использующие для работы анатомические особенности и черты животных. В настоящее время одними из наиболее популярных являются роботы, передвигающиеся при помощи движений, которые напоминают крабовые. Они интересны тем, что применяют сложную систему движений для перемещения каждой из «ног» по очереди. Благодаря этому такие механизмы способны без особых проблем передвигаться по разным поверхностям, в отличие от роботов, использующих для передвижения колеса. Колесные роботы ограничены в перемещениях, так как не могут передвигаться по некоторым типам грунта.
Рассмотрим самые современные модели зооморфных роботов с четырьмя и более ногами.
1. Strandbeest
Этот оригинальный робот ходит стильно, как никто другой. На создание данной модели разработчика – пользователя сервиса Thingiverse под ником nraynaud - вдохновила механическая конструкция, изготовленная голландским художником Тое Янсесом. Strandbeest оснащен шагающим механизмом, состоящим из коленчатого вала, который соединен со всеми ногами. Каждая нога имеет несколько шатунов, размеры которых были определены эмпирическим методом. Вся конструкция передвигается с помощью моторов, управляется дистанционно и имеет походку, напоминающую походку четвероногого зверя.
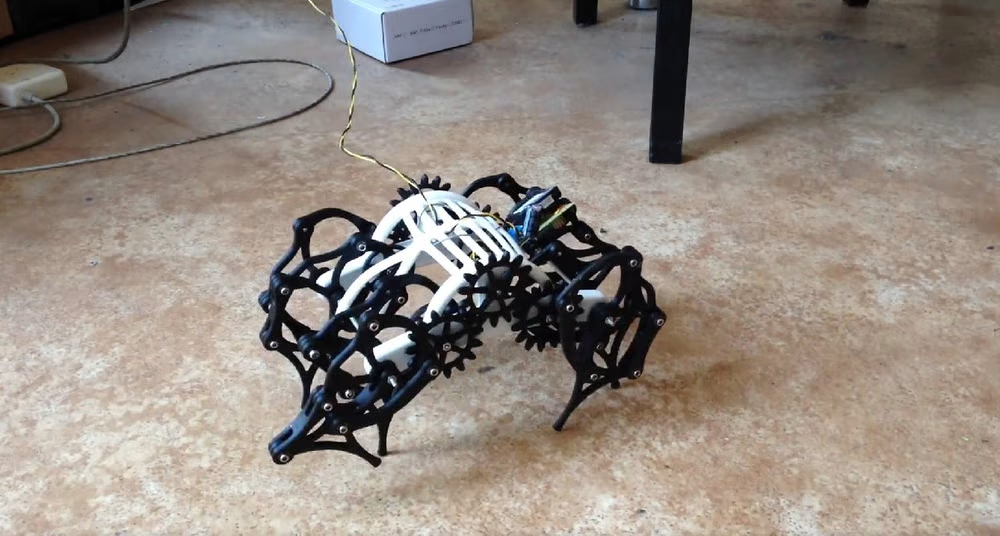
Идти стильно, как никто другой (Источник: Gfycat)
Приводимый в движение силой ветра, Strandbeest может двигаться вперед или назад без поворотов, поскольку у него нет переднего направления. Для передвижения ему требуется, как минимум, четыре ноги, но количество конечностей может быть увеличено до любого четного числа.
Как и его прототип, робот Strandbeest может вращаться. Наблюдение за походкой робота оставляет поистине яркое впечатление, так как сложный суставной механизм, лежащий в основе конструкции, обеспечивает по-настоящему плавное движение.
Робот оснащен простой электроникой и легко программируется, поэтому считается малогабаритным. Но чем устройство действительно выделяется, так это тем, что имеет сложную систему суставов.
Файлы для изготовления этого робота методом 3D-печати можно найти на сайте Thingiverse.
2. Флексоскелет
Флексоскелет ходит, как жук, и двигается, как послушный механизм.
Что получится, если объединить гибкие механизмы и жуков? Флексоскелет! Этот зооморфный робот был разработан Джеймсом Цзяном, аспирантом из Калифорнийского университета в Сан-Диего. Механизм устройства использует гибкость материала, чтобы имитировать гибкость мышц. Тело робота полностью напечатано на 3D-принтере.
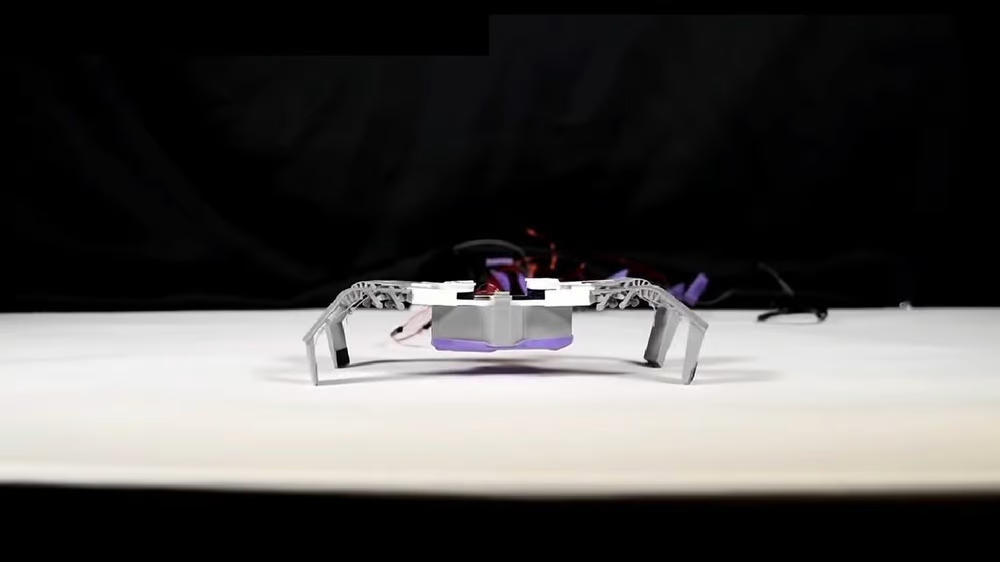
Ходи как жук, двигайся как послушный механизм (Источник: JacobsSchoolNews на YouTube)
Вместо использования винтов и стержней, флексоскелет применяет принцип податливого механизма для перемещения ног и их возвращения в естественное положение. Это устраняет необходимость использования суставов, пружин и поршней. В роли собственной пружины робота выступает гибкость материала. В результате не только тратится меньше материалов, но и создается более естественная походка, напоминающая походку живого существа. Кроме того, подобная конструкция упрощает программирование, поскольку не требуется учитывать движения независимых суставов.
Флексоскелет ярко демонстрирует принцип, что иногда решение не обязательно должно быть сложным, достаточно просто продумать его по-другому.
3. OpenCat
OpenCat – модель роботизированного кота доктора Ли.
Ронгжонг Ли – доцент Университета Уэйк Форест в Северной Каролине и создатель 3D-печатного роботизированного кота с открытым исходным кодом. После того, как OpenCat попал в еженедельную подборку видеороликов о роботах на сайте IEEE Spectrum, на разработчика обрушился шквал предложений по дальнейшему развитию его личного проекта.
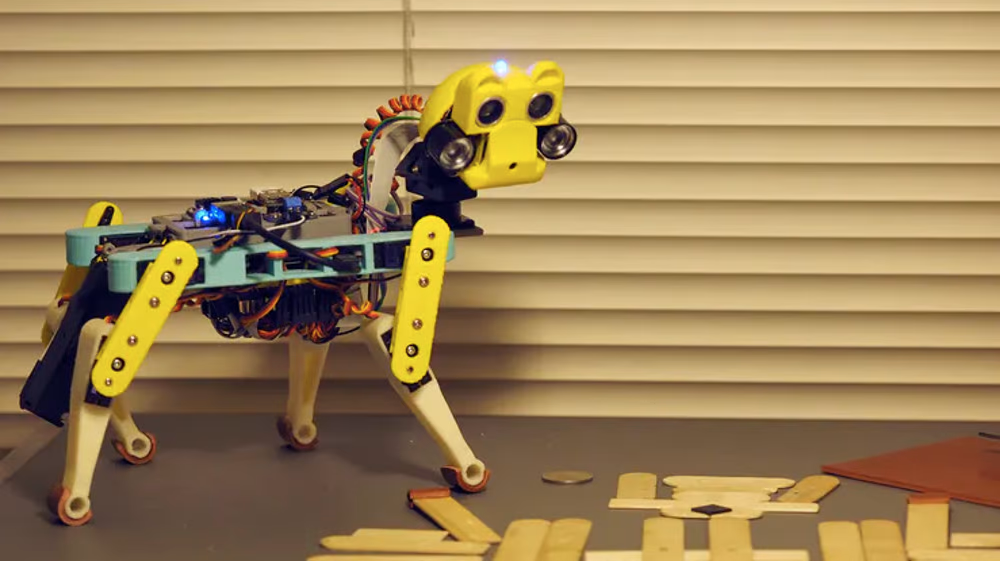
Ранняя модель кота-робота доктора Ли (Источник: Rongzhong Li на Hackster)
На своей странице в системе Hackster доктор Ли объясняет, что начал работу над проектом летом 2016 года. С тех пор его роботизированный кот прошел через семь итераций, каждая из которых была сложнее предыдущей.
На платформе GitHub можно найти полный список материалов и файлов, необходимых для создания этого кота. Доктор Ли рекомендует использовать нити филамента ABS, резину (TPU), токопроводящие и нейлоновые нити.
В настоящее время у доктора есть две рабочие модели: меньшая, работающая на базе модуля Arduino и предназначенная для STEM-образования и сообщества разработчиков, и более крупная модель со встроенным модулем Raspberry Pi для восприятия, усиленного искусственным интеллектом.
В настоящее время доктор Ли ищет средства для развития OpenCat из частного в совместный проект и, в конечном итоге, в массовый продукт.
4. Kame
Робот Kame – само воплощение движения. Это 3D-печатный робот, разработанный на базе FreeCAD и имеющий форму маленького четвероногого. Механизм был создан с целью изучения особенностей различных походок и соответствующих алгоритмов.

Каме — это движение (Источник: Javier Isabel на Hackaday)
Построенный на основе модуля Wi-Fi Esp8266, Kame имеет восемь сервоприводов (по два на каждую ногу), небольшой аккумулятор LiPo и может быть запрограммирован с помощью Arduino. Наблюдение за тем, как он идет навстречу с непоколебимой уверенностью, одновременно впечатляет и пугает.
Более подробную информацию, включая полные исходники FreeCAD и исходный код, можно найти в репозитории сервиса GitHub. Подробные инструкции по сборке этого робота также представлены на странице Hackaday.
5. Vorpal
Робот-гексапод Vorpal (Ворпал) – еще один отличный инструмент для образования.
Vorpal является разработкой Стива Пендергаста. С момента успешной краудфандинговой кампании в 2018 году этот робот продолжает оставаться уникальным кустарным проектом в сфере 3D-печати для учебных кабинетов.
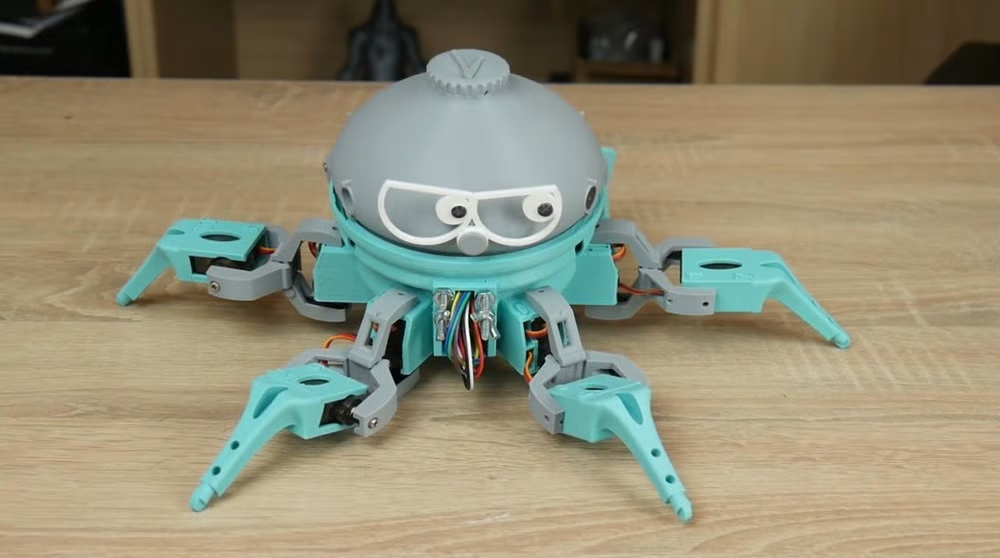
Шестиногий робот Vorpal — еще один отличный образовательный инструмент (Источник: Makezine)
Робот Vorpal имеет полностью открытый исходный код, может быть запрограммирован с нуля и управляется через Bluetooth. Это отличный проект для детей и взрослых, предназначенный для ознакомления с робототехникой и кодированием. Получить более подробную информацию о проекте можно на сайте Vorpal Robotics.
Робота Vorpal можно собрать самостоятельно (это обойдется примерно в 60 долларов), а также приобрести в полностью собранном виде или в виде наборов для сборки разного уровня.
6. Xpider
Если вы боитесь насекомых и арахнидов, вам может не понравиться 3D-печатный робот Xpider, внешне напоминающий паука. Но, к счастью, он выглядит не очень страшно и даже довольно безобидно.

К счастью, Xpider не так страшен (Источник: Personal Robots)
Xpider был разработан командой дизайнеров из Китая Roboeve в 2017 году. Этот крошечный механизм имеет диаметр 3,4 дюйма (8,6 см) и весит всего 5,3 унции (около 200 гр.).
Ключевой особенностью робота Xpider является миниатюрная камера, установленная на его голове. Робот пробирается и проползает через сложные препятствия, чтобы достичь заданной цели, а затем передает отснятый материал своему оператору. Оболочка устройства напечатана на 3D-принтере. Перед тем, как обрести конечный дизайн, она разрабатывалась в течение нескольких итераций.
На сайте Hackaday можно найти файлы для самостоятельной распечатки оболочки робота Xpider.
Малогабаритные роботы
Не все роботы должны быть сложными или масштабными, чтобы считаться передовыми. Иногда продвинутые функции могут быть заложены в программировании или использоваться в образовательных целях, а также применяться в рамках изучения одного конкретного метода движения.
В робототехнике есть множество интересных задач и много аспектов, с которыми можно экспериментировать. Уменьшение размеров механизмов – одна из таких задач.
1. SMARS
Робот SMARS имеет модульную конструкцию, благодаря чему возможности его настройки поистине безграничны.
SMARS имеет модульную конструкцию, поэтому персонализация безгранична (Источник: Korey Webb)
SMARS – это аббревиатура от «безвинтовая/винтовая модульная роботизированная система». Этот простой и недорогой 3Д-печатный модульный робот был создан для использования в сфере образования. Он имеет минимальное количество компонентов и может быть собран без применения винтов, пайки или клея.
Благодаря модульной конструкции робота разработчики могут легко устанавливать в механизм различные датчики и инструменты, и даже создавать собственные детали. Изобретатель Кевин Томас подал пример, выпустив огромное количество рабочих модов. Если поискать DLC (дополнительные модули) для SMARS, можно найти способы превратить робота в четвероногого или добавить ему лопату и т.д.
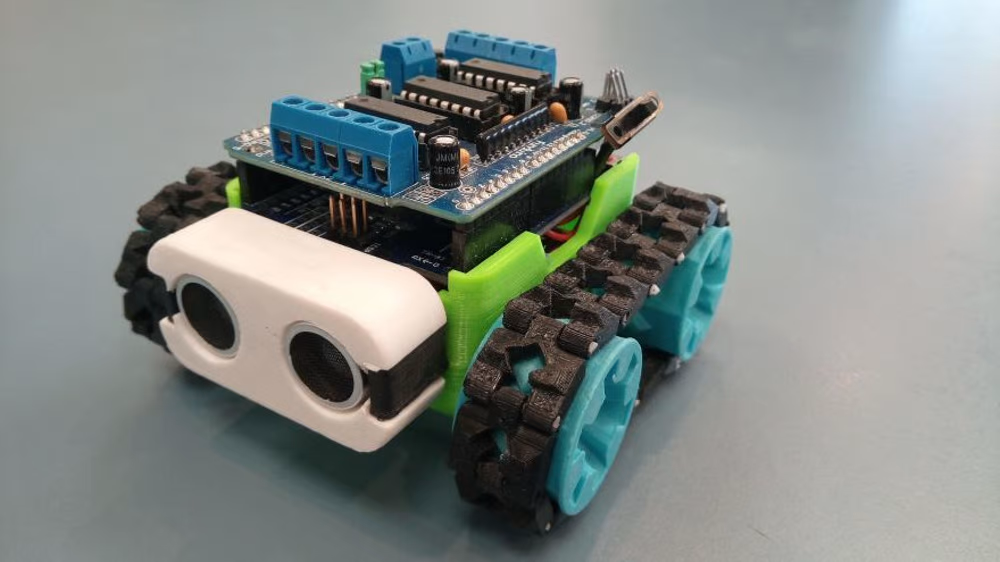
2. LittleBot
Эту руку-манипулятор можно изменять, добавляя новые функции.
LittleBot был создан командой разработчиков Slant Concepts, ранее известной как Slant Robotics, в 2017 году. Механизм имеет очень простое шасси и функционирует на основе ультразвуковых датчиков, которые предотвращают столкновения робота с объектами. Однако, прелесть этого робота заключается в том, что его можно запрограммировать для выполнения множества разнообразных функций, включая следование по линии, обнаружение объектов и распознавание шума. LittleBot даже можно использовать в качестве небольшой вспомогательной корзины для подключения дополнительных компонентов Arduino, чтобы расширить возможности робота в плане принятия решений.

Измените руку, чтобы добавить функции (Источник: Slant Robotics на Kickstarter)
LittleBot – отличный стартовый робот для знакомства с зондированием и методами принятия решений. Изначально разработанный в рамках кампании на платформе Kickstarter, он привлек 58 сторонников, что значительно превысило цель кампании. Узнать больше о проекте и его преемниках можно на YouTube, Arduino Project Hub и Hackster.io.
3. IMA Juno
IMA Juno – простой робот, созданный для начинающих робототехников.
В 2016 году канадская компания Explore Making выпустила IMA Juno в качестве учебного инструмента для изучения основ робототехники, кодирования на Arduino и 3D-печати. Спроектированный на базе SolidWorks, этот образовательный робот умеет двигаться вперед, назад и поворачивать в стороны.
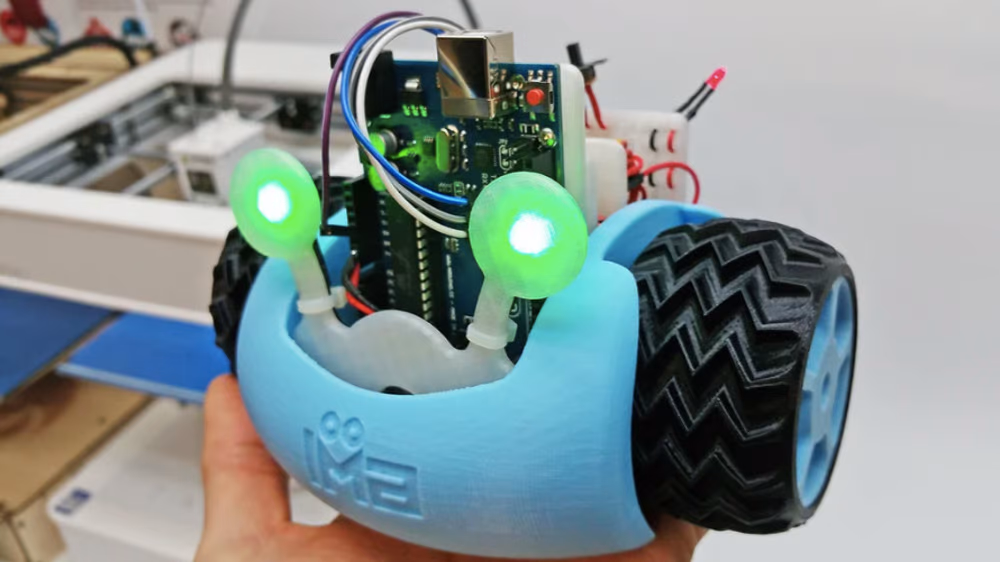
IMA Juno — простой робот, разработанный для начинающих робототехников (Источник: ExploreMaking на Thingiverse)
Следуя пошаговым инструкциям, пользователь узнает о базовой проводке, светодиодных элементах, серводвигателях и коде Arduino. Все 3Д-печатные детали Ima Juno оптимизированы для печати на любом настольном 3D-принтере (только нужно учитывать, что придется использовать свесы).
Если вы ищете глубокий проект по 3Д-печати, то IMA Juno – оптимальный выбор для начального применения и впечатляющий маленький робот для своих размеров.
4. Simple (робот без названия)
Этот четвероногий робот использует карандаши в качестве ног.
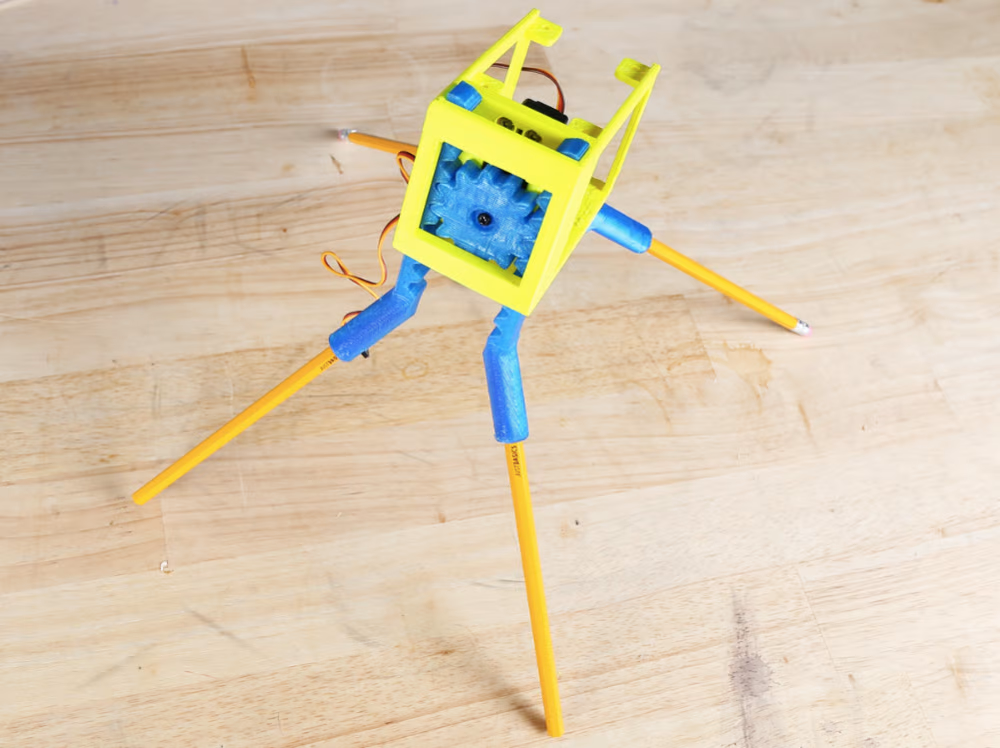
Этот четвероногий робот использует карандаши в качестве ног (Источник: randofo на Instructables)
Когда заходит речь о создании вещей, в дело вступает Рэнди Сарафан – своего рода легенда в области мейкерства. Рэнди основал студию дизайна Instructables, составил свыше 300 инструкций и написал несколько книг по робототехнике и электронике. Его 3Д-печатный робот, не имеющий названия, довольно прост в печати и сборке, а также легко программируется и может ходить. Для изготовления этого механизма нужны лишь трехмерный принтер, сервоприводы, модуль Arduino, 9-вольтовая батарея, несколько гаек и болтов и четыре карандаша для ног. На своей странице в Instructables Рэнди дает подробные инструкции для каждого шага процесса изготовления робота.
5. Buddy
Buddy – милый, очаровательный «социальный» робот от компании LittleBots, отличающийся от роботизированных рук этого производителя. Робот имеет простой механизм, который легко сделать своими руками. Он полностью напечатан на 3Д-принтере, управляется при помощи программируемого модуля Arduino и предназначен для ознакомления с социальной робототехникой. Buddy использует ультразвуковой датчик, чтобы «видеть» и взаимодействовать с окружающим миром. Несмотря на то, что робот имеет всего три точки артикуляции, он очень выразителен.

Эти милые роботы-приятели — социальные существа (Источник: LittleBots на Instructables)
На сайте Instructables можно найти учебник и список компонентов для создания робота Buddy.
6. Fighting (боевой)
Этот боевой робот способен победить других роботов! Только он не умеет бить.
3D-печатный боевой робот, разработанный Мэттом Чо, представляет собой гибкий роботизированный механизм, способный выполнять такие боевые движения, как апперкот или хук, обеими руками.

TЭтот робот может пинать роботов сзади! (За исключением того, что на самом деле он не может пинать) (Источник: Matt Cho Archives 2 на YouTube)
В настоящее время существует множество модификаций боевых роботов, основными характеристиками которых являются высокая прочность и устойчивость к падениям. Модель Fighting была создана в качестве эксперимента для изучения свойств другого типа боевого робота – более легкого, динамичного, способного ходить и наносить быстрые удары. Благодаря особенностям своей конструкции этот робот может вставать на ноги после толчка, сгибать их, ходить боком и вперед. Но из-за повышенной устойчивости нижней части туловища, которая не позволяет ему падать, робот не может поднимать ноги для выполнения ударов.
Данную модель рекомендуется печатать из прочного материала, чтобы боевой робот мог выдерживать удары без повреждения конструкции.
Применение аддитивных технологий способствует активному развитию робототехнической отрасли и дает возможность создавать практически любые механизмы – от четвероногих или гуманоидных роботов до инсектоидных автоматов.
3D-печать отлично сочетается с робототехникой, так как открывает перед конструкторами массу возможностей для добавления новых функций в их творения и позволяет конечным пользователям настраивать роботов под свои конкретные нужды.