















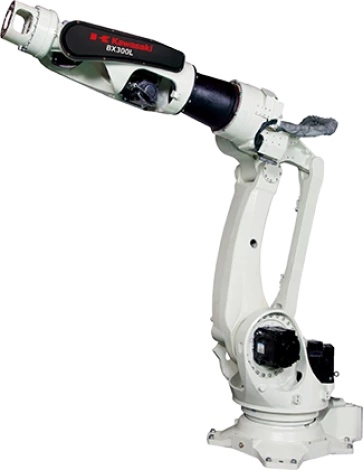
Робот Kawasaki RS013N




Хочу в подарок
Вы можете оставить контакты того, который приобретет вам этот товар
Хочу скидку
Подпишитесь на нашу рассылку, чтобы не пропустить момент, когда на товар
будет действовать скидка
Дополнительные услуги:
Бесплатная доставка от 100 тыс. руб.
Описание
Скорость, широкая рабочая зона и компактный корпус - вот главные преимущества новейшей высокопроизводительной модели Kawasaki RS013N, которая является лидером в своей отрасли.
| грузоподъемность: | 13 кг |
| радиус действия: | 1460 мм |
| количество осей: | 6 |
| точность: | ±0,03 мм |
Области применения:
- Сборка
- Обслуживание станков
- Перемещение материалов
- Механическая обработка
- Распределение наполнителей
- Газодинамическое напыление
Размеры и диапазоны движения



Характеристики:
| Тип | Шарнирный робот | ||
|---|---|---|---|
| Управляемых осей (Степени свободы) | 6 | ||
| Полезная нагрузка на кисть (кг) | 10 | ||
| Предельная досягаемость (мм) | 1 460 | ||
| Повторяемость (мм) ✽1 | ±0.03 | ||
| Угол поворота (°) | Рука вращение (JT1) | ±180 | |
| Рука вперед-назад (JT2) | +138 - −105 | ||
| Рука вверх-вниз (JT3) | +135 - −159 | ||
| Запястье поворот (JT4) | ±200 | ||
| Запястье сгиб (JT5) | ±125 | ||
| Запястье вращение (JT6) | ±360 | ||
| Максимальная скорость (°/s) | Рука вращение (JT1) | 265 | |
| Рука вперед-назад (JT2) | 250 | ||
| Рука вверх-вниз (JT3) | 265 | ||
| Запястье поворот (JT4) | 475 | ||
| Запястье сгиб (JT5) | 475 | ||
| Запястье вращение (JT6) | 730 | ||
| Момент силы (N•м) | Запястье поворот (JT4) | 26 | |
| Запястье сгиб (JT5) | 26 | ||
| Запястье вращение (JT6) | 10 | ||
| Момент инерции (кг•м2) | Запястье поворот (JT4) | 0.9 | |
| Запястье сгиб (JT5) | 0.9 | ||
| Запястье вращение (JT6) | 0.3 | ||
| Масса (кг) | 170 | ||
| Цвет корпуса | соответствует Munsell 10GY9/1 | ||
| Монтажное положение | Пол, потолок | ||
| Условия окружающей среды (эксплуатации) | Температурный режим (°C) | 0 - 45 | |
| Относительная влажность (%) | 35 - 85 (строгое отсутствие конденсата или инея) | ||
| Требования по электропитанию (kVA) ✽2 | 2.0 | ||
| Степень защиты | Запястье: соответствует IP67 / Корпус / рука: соответствует IP65 | ||
| Контроллер | F60 | ||
✽1: Значение соответствует ISO9283.
✽2: В зависимости от нагрузки и характера движения.
Видеообзор модели:
Характеристики
| Производитель | Kawasaki |
| Артикул | 195668 |
| Досягаемость | 1460 мм |
| Точность | 0.03 мм |
| Грузоподъемность | 13 кг |
| Страна производитель | Япония |
Оплата и доставка
Доставка во все регионы России и за ее пределы
- Доставка по адресам, расположенным в пределах европейской части России, обычно занимает не более двух-трёх рабочих дней — с понедельника по пятницу.
- Доставка по адресам, расположенным за пределами страны, обычно занимает больше времени, но мы стараемся отправлять наши заказы самым быстрым способом.
Варианты получения продукции
Оплата с помощью банковской карты
Для выбора оплаты товара с помощью банковской карты на соответствующей странице сайта необходимо
нажать кнопку «Оплата банковской картой». Оплата происходит через авторизационный сервер
Процессингового центра Банка с использованием Банковских кредитных карт следующих платежных систем:
VISA International
MasterCard World Wide
VISA International
MasterCard World Wide
Оплата банковскими картами VISA




К оплате принимаются все виды платежных карточек VISA, за исключением Visa
Electron. В большинстве случаев карта Visa Electron не применима для оплаты через интернет, за исключением
карт, выпущенных отдельными банками.
О возможности оплаты картой Visa Electron вам нужно выяснять у банка-эмитента вашей карты.
О возможности оплаты картой Visa Electron вам нужно выяснять у банка-эмитента вашей карты.
Оплата кредитными картами MASTERCARD





На сайте к оплате принимаются все виды MasterCard.
Видео
Оставить отзыв
Техническая документация
Похожие товары

Досягаемость
1100 мм
Интерфейсы
Ethernet TCP/IP, MODBUS Master, MODBUS Slave, MODBUS/TCP, Serial RS-232C
Грузоподъемность
14 кг
Под заказ




Грузоподъемность
200 kg
Рабочий диапазон
2 676 mm
Вес нетто
1 360 kg
Под заказ

Досягаемость
3.15 м
Грузоподъемность
250 кг
Вес нетто
1650 кг
Под заказ

Досягаемость
1300 мм
Интерфейсы
Ethernet TCP/IP, MODBUS Master, MODBUS Slave, MODBUS/TCP, Serial RS-232C
Грузоподъемность
12 кг
Под заказ

Преимущества работы с нами
Прямые поставки от производителей
Любая форма оплаты
Собственный склад оборудования
Квалифицированные специалисты
Будьте в курсе
Нажимая кнопку «Подписаться», вы подтверждаете согласие на обработку
персональных данных.